Hello and Welcome! My name is George Kudyba and I am a Senior Mechanical Engineering student at the Georgia Institute of Technology. My interest in drones started when my brother purchased a small $50 dollar QuadCopter from amazon.com. The first time I saw him fly the little drone I knew I could build a drone myself. So, I began work researching the basics of multi-rotor drones. I used SolidWorks to produce drawings of what I wanted to build. I then used these drawings as templates to hand fabricate the frame. The first drone was completed and was a complete success (even after a few rough landings that left the arms bent and distorted). However, Creating a perfectly symmetrical frame with hand-tools was nearly impossible.
So the next step in the project is designing a drone that I can 3-D print (or at-least 3-D print pieces of it). 3-D printing would allow for an extremely customizable drone that could be repaired at the click of a button. I have started work designing a Vtail Quadcopter where I can incorporate 3-D printing front motor mounts and also rear V shaped wings.
Below are samples of my work so far on these projects. Enjoy!
3D Drawings
CAD drawing of the first QuadCopter produced

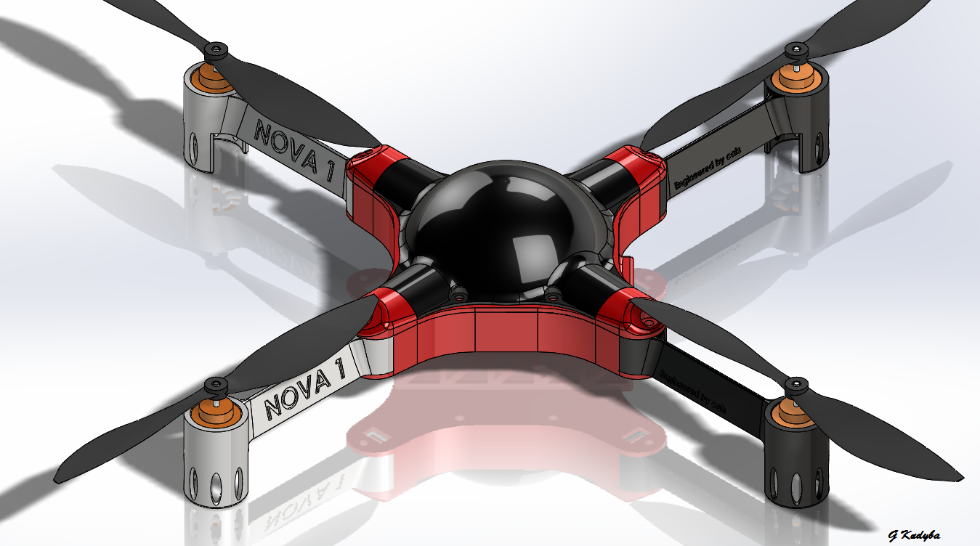
Picture of a Concept QuadCopter that could be 3-D printed. The Previous drone has all electronics attached to the frame and exposed to the elements. The idea behind this concept drone was to have all electronic components enclosed in the structure of the Drone.
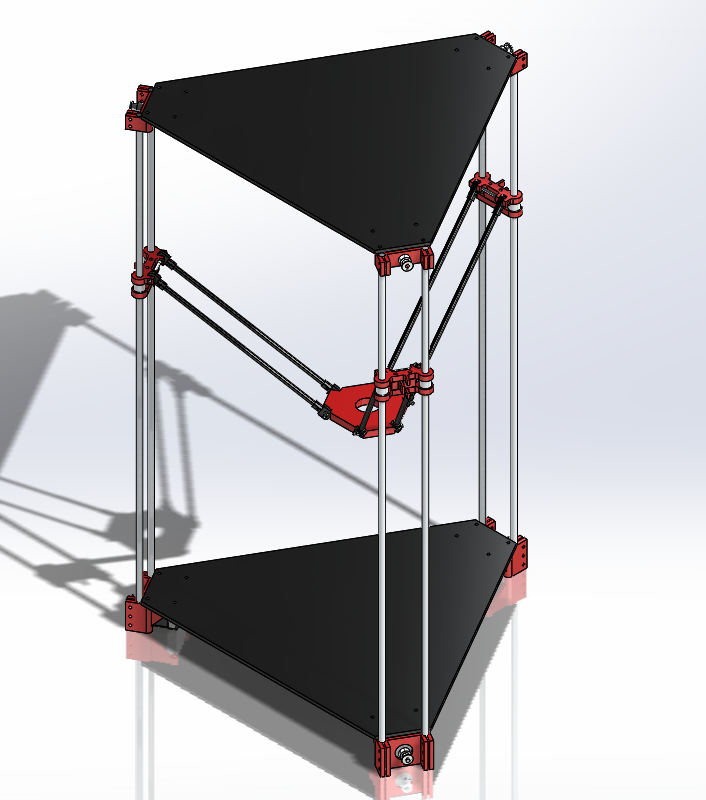
Picture of a Delta Style 3-D printer. I drew this for my brother who wanted to build a 3-D printer from scratch. He is currently building the 3-D printer and I hope to soon have photos of the completed printer for comparison
Photos of Multi-Rotor Drones
(note: I do not own a Professional Camera, these are all taken from a Cellphone)
The first QuadCopter built, fully functional and has a flight time of roughly 5-8 minutes. The frame is made of aluminum bars and light weight modeling plastic. As you can see, all the electronics are exposed except for the power distribution board which is inside the frame.

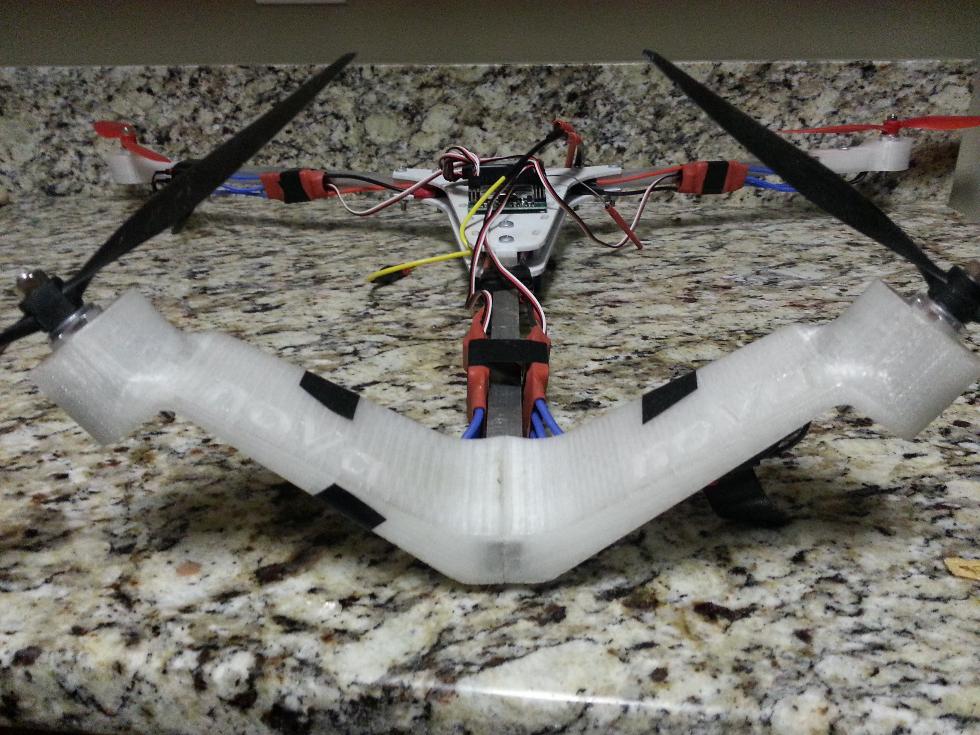
For the second quadcopter I decided to produce a V-Tail to help solve the problem of losing orientation while flying Multi-Rotor Drones. Also, V-Tails can be produced in multiple ways; leaving room for personal design and customization. The front motor mounts and rear V motor mounts are both 3-D printed parts. These components were designed by me and printed at the Georgia Tech Invention Studio.

Photo of the 3-D printed front motor mounts. I designed these to be able to slide onto the aluminum bars of the frame and be bolted on with only one fastener for easy replacement after a crash.

Rear view of the 3-D printed V structure. The V structure is two parts that are split down the middle. Having two parts allows for easy part replacement. If one side breaks after a crash, only half of the structure has to be reprinted not the entire structure.
Close up of rear motor mount

The Vtail project is still in the works. As you can tell by the photos some of the wiring and Electronic Speed controllers are held on by just electrical tape. However, the Vtail does fly and is fully functional. New motors are required. The motors currently on the Vtail do not allow for a long flight time, only about 1 or 2 mins. New photos will come when I have replaced the motors, added landing struts, and securely attached all electronic speed controllers